

PRODUCTS
产品

Software Motion Control
WMX (Soft Motion)
WMX 由 Movensys 独有的 Soft Motion 技术开发而成,是一款基于软件的运动控制解决方案。

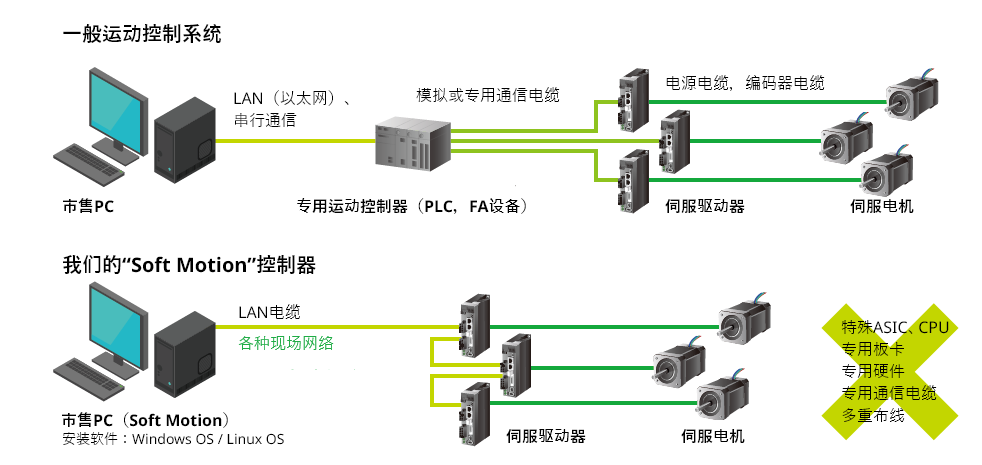
WMX 采用 Movensys 独有的 Soft Motion 技术,仅通过软件即可在通用 Windows 电脑上实现设备的运动控制。这一解决方案简化了传统硬件控制器的复杂布线,通过一台PC即可实现多种运动控制功能。工程师可以根据设备的需求设置实时控制线程,以满足超高速、高精度的控制要求。而且,WMX支持多种开发语言和工具,能够满足客户的各种开发环境需求。
选项
-
▧ 许可 :
Windows, Standard, Advanced
-
▧ 操作系统环境 :
-
Windows+实时操作系统RTX64
128轴(1ms)~16轴(125μs)控制 -
Windows OS (Non Real-time)
EtherCAT(128轴,8ms)
模拟(128轴,1~8ms)
-
Windows+实时操作系统RTX64
-
▧ 通信 :
EtherCAT, CC-Link IE TSN, MECHATROLINK-4(支持混合通信)
许可证功能

*1) 非实时操作系统(Non-RTOS)版本为演示版本,无需许可证可保持每小时连续通信状态。此外,在模拟模式下,可以不受功能限制地进行API测试。
*2) 实时操作系统(RTOS)的评估版仅限使用3个月。
*3) WMX3的AVX、SCARA、6-DOF等选项功能,仅可在Advanced许可证中使用。
详细规格
产品规格
-
控制轴数
4~128轴 | 同步、插补控制时最多64组
-
I/O点数
输入64,000点 | 输出64,000点 | 总计15.625KB
-
通信周期
31.25μs ~ 8ms ※根据 CPU 性能和通信平台的不同,可能会有所差异。
-
最大节点数
256
-
通信平台
EtherCAT | CC-Link IE TSN | MECHATROLINK-4
-
通信连接方式
线性 | 环形 | 星型 | 混合通信
-
开发语言
C | C++ | C# | VB | Python
PC推荐规格
-
CPU
推荐Intel第8代及以上,i3, i5, i7, Xeon
-
操作系统
推荐Windows 10 IoT Enterprise LTSC
-
版本
Windows 10 1809及以上
-
支持网卡
支持Intel NIC
-
RAM
8GB以上


核心技术 – Soft Motion 技术
Movensys 的 Soft Motion 技术由最佳通信结构的软件主站以及实时模块化同步与动态通道管理技术组成。 Soft Motion 通过高度优化的模块化、开放式架构(Movensys 专利),提供与其他软件、网络等的广泛兼容性。
-
▧ 稳定的实时性功能
- 在Windows系统中生成的控制指令会被存储至各内存通道和缓冲区,并按照周期传递指令,以确保周期稳定性。
- 无论使用任何网络, 均可通过统一的控制信号和语言,实现高效且精确的控制运算。
- 在实时操作系统(Real-time OS)中,每个周期都能自动更新控制,从而实现稳定的控制。
- 可设置所需周期,灵活构建序列。
-
▧ 支持多网络
- 控制模块与通信模块相分离,只需更改接口即可匹配不同的网络。
- 在接口内定义两种或多种通信协议,可实现混合网络的灵活应用。
-
▧ 程序扩展性
- 可与运动控制以外的第三方应用程序实现最佳集成。
- 公开并提供API库,支持自主序列开发和定制化应用。
-
▧ 设备的稳定性与扩展性
- 除常规运动控制外,支持添加额外的控制设备。
- 自动为每个设备创建状态监控管理模块,如启动状态等,以保持系统资源的最佳状态。
-
每个设备都具有单独的内存和缓冲区,最大限度地减少设备之间的冲突。
* Device(设备): 能够执行控制任务的要素或处理器,实用程序。
-
▧ 硬件兼容性高
- 仅考虑通信协议即可兼容多种从属硬件。
- 利用多网络通讯时可最大限度地提高硬件的可扩展性。



