

PRODUCTS
PRODUCTS

Software Motion Control
WMX (Soft Motion)
WMX는 모벤시스만의 소프트 모션 기술로 개발된 소프트웨어 기반 모션 컨트롤 솔루션입니다.

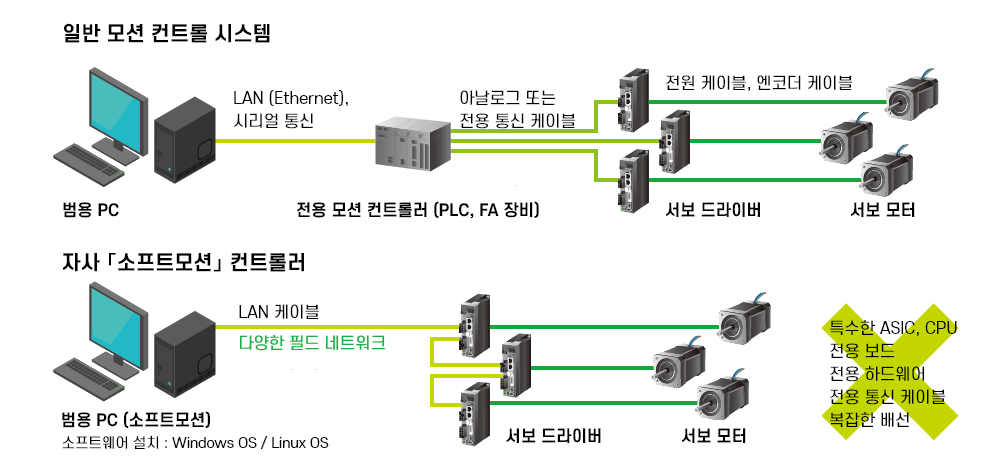
WMX는 모벤시스만의 고유한 소프트 모션 기술로 이루어져 있어 순수 소프트웨어만으로 범용 Windows PC에서 장비의 모션 제어가 가능한 솔루션입니다.
기존 하드웨어 컨트롤러의 복잡한 배선을 간소화 시켜 한 대의 PC로 다양한 모션제어를 가능하게 합니다. 엔지니어는 초고속, 초정밀도에 필요한 실시간 제어 스레드를 장비에 맞게 설정하여 사용할 수 있습니다. 특히 여러 개발 언어와 도구들을 지원하여 고객의 다양한 개발 환경을 지원합니다.
특장점
- Real-time OS를 기반으로 멀티 코어 CPU 중 코어 1개 이상을 점유하여 정주기성 및 실시간 제어 확보
- Open Architecture를 통해 WMX에 포함된 기본 모션 기능 이외에도 사용자가 직접 필요한 기능을 추가로 개발 가능
- 범용 프로그래밍 언어(C, C++, C#, VB, Python)를 활용하여 사용자가 원하는 기능을 손쉽게 개발 가능
- EtherCAT Master Class의 최고 등급인 Class A 표준 취득
- EtherCAT, CC-Link IE TSN, MECHATROLINK-4 통신을 지원함과 동시에 하이브리드 제어 가능
Option
-
▧ 라이선스 :
Windows, Standard, Advanced
-
▧ OS 환경 :
-
Windows + Real-time OS RTX64
128축(1ms)~16축(125μs) 제어 -
Windows OS (Non Real-time)
EtherCAT(128축, 8ms)
Simulation(128축, 1~8ms)
-
Windows + Real-time OS RTX64
-
▧ Communication :
EtherCAT, CC-Link IE TSN, MECHATROLINK-4 (하이브리드 통신 가능)
라이선스별 기능
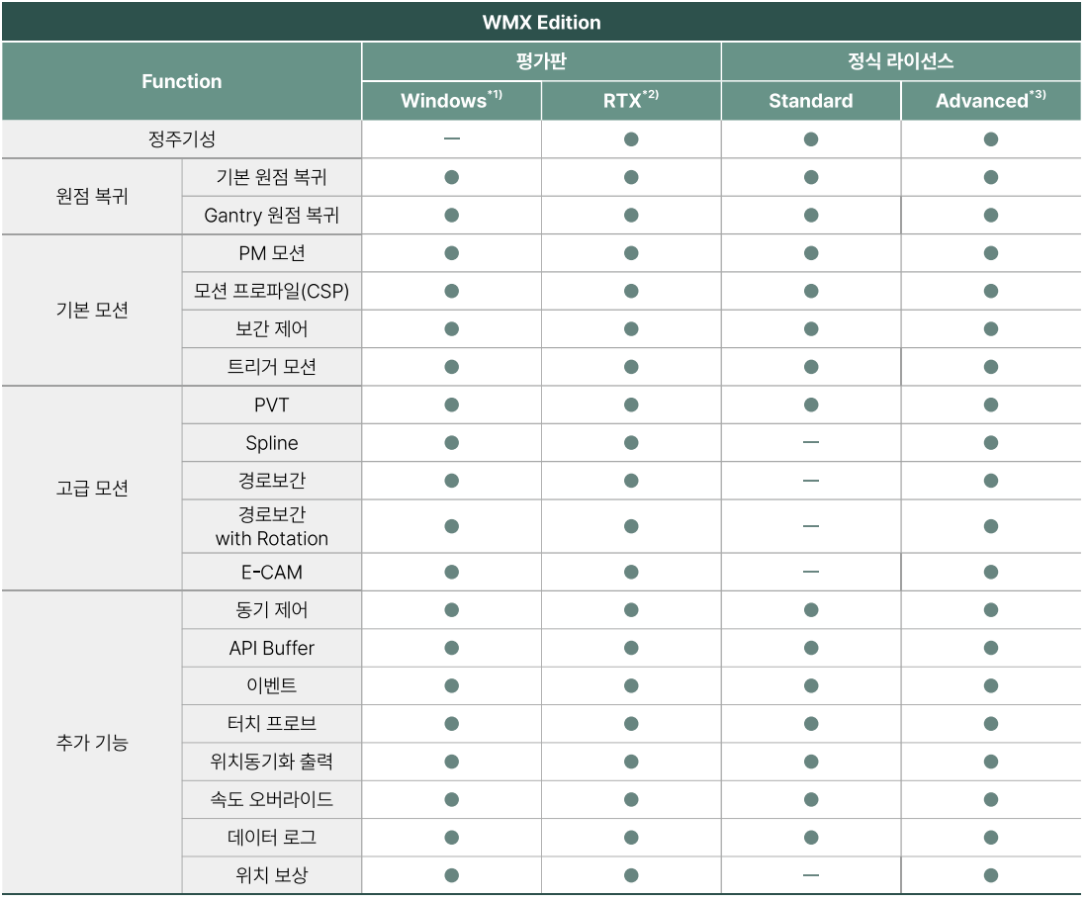
*1) non-RTOS 버전은 Demo 버전으로 라이선스 없이 연속적인 통신 상태를 1시간 단위로 유지할 수 있습니다. 또한, 시뮬레이션 모드에서 기능에 제한 없이 API 테스트가 가능합니다.
*2) RTOS 평가판은 3개월만 사용이 가능합니다.
*3) WMX3 옵션인 AVX, SCARA, 6-DOF 기능은 Advanced 라이선스에서만 적용 가능합니다.
상세사양
제품 사양
-
제어 축 수
4~128축 | 동기, 보간 제어 시 최대 64세트
-
I/O 점 수
입력 64,000점 | 출력 64,000점 | 총 15.625KB
-
통신 주기
31.25μs ~ 8ms ※CPU 성능과 통신 플랫폼에 따라 상이함
-
최대 노드 수
256
-
통신 플랫폼
EtherCAT | CC-Link IE TSN | MECHATROLINK-4
-
통신 연결 방식
Line | Ring | Star | Hybrid Communication
-
개발 언어
C | C++ | C# | VB | Python
PC 권장 사양
-
CPU
Intel 8세대 이상 권장, i3, i5, i7, Xeon
-
운영 체제
Windows 10 IoT Enterprise LTSC 권장
-
버전
Windows 10 1809 이후
-
지원 네트워크 카드
Intel NIC 지원
-
RAM
8GB 이상
응용분야
관련 보도자료 보기
반도체
전/후 공정(포토, 에칭, 세정기, 검사 공정)
웨이퍼 이송 로봇
Stocker/OHT/AMR
01

-
01
반도체
-
02
디스플레이
-
03
스마트 기기
-
04
이차전지
핵심기술 – Soft Motion Technology(소프트 모션)
모벤시스의 소프트 모션 기술은 통신 최적 구조의 소프트 마스터와 실시간 모듈러 동기 및 동적 채널 관리 기술로 구성되어 있습니다. 소프트 모션은 고도로 최적화된 모듈러, 개방형 아키텍처(모벤시스 특허)를 통해 다른 소프트웨어, 네트워크 등과의 다양한 연결성을 제공합니다.
-
▧ 안정적 실시간성 구현
- 윈도우에서의 제어 명령은 각 메모리 채널 및 버퍼에 저장되며, 주기에 맞춰 지령을 전달하여 정주기성을 유지함
- 네트워크와 관계없이 동일한 제어 신호 및 언어를 통해 빠르고 정확한 제어 연산이 가능함
- Real-time OS 상에서 제어를 정확한 주기마다 자동 업데이트할 수 있어 안정적인 제어 가능
- 원하는 주기를 설정할 수 있어 시퀀스 구성에 자유로움
-
▧ 멀티 네트워크
- 제어 모듈과 통신 모듈이 분리되어 있어 인터페이스 변경만으로 다양한 네트워크 매칭 가능
- 인터페이스 내에 두 개 이상의 통신 프로토콜을 정의하여 Hybrid 네트워크 활용 가능
-
▧ 프로그램 확장성
- 모션 제어 외의 3rd party 프로그램과도 최적 연계 가능
- API 라이브러리를 공개, 제공하여 자체 시퀀스 개발 및 커스터마이징 활용 가능
-
▧ 디바이스 안정성 및 확장성
- 일반모션 외 별도 제어 디바이스 추가 가능
- 각 디바이스별로 기동 유무 등의 상태 모니터링 관리부가 자동 생성되어 최적 시스템 리소스 유지 가능
-
각각의 디바이스는 개별 메모리와 버퍼를 활용하며, 디바이스 간 충돌 최소화
* 디바이스: 제어 작업을 수행할 수 있는 요소나 핸들러, Utility
-
▧ 하드웨어와 높은 호환성
- 통신 프로토콜만 고려하여 다양한 슬레이브 하드웨어 호환 가능
- 멀티 네트워크 활용 시 하드웨어 확장성 극대화
문의가 필요하신가요?




출시 예정 제품
SDMC
(Software Defined Motion Controller)장비를 넘어 공장 전체 최적화 제어를 위한 클라우드 기반의 차세대 소프트 모션 솔루션
WMX Ultra
(WMX High-end Solution)고성능·고정밀 모션 제어가 가능한 WMX의 하이엔드 솔루션
WMX R2
(WMX Real-time Robotics)WMX를 기반으로 Physical AI를 초저지연으로 구현하는 실시간 실행 계층 ROS2 패키지